6 现代卷积神经网络
1 深度卷积神经网络 (AlexNet)
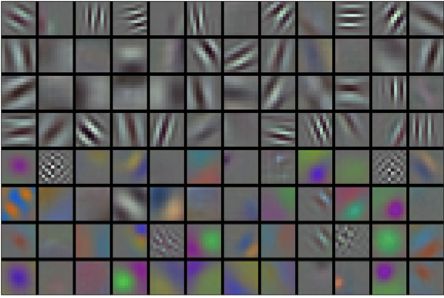
与传统机器学习相信模型的重要性不同的是, 计算机视觉领域, 人们更相信数据集的质量, 以及特征提取. 在 AlexNet 中, 首先人们来检测图片中的局部特征, 例如下图:
AlexNet 的架构和 LeNet 原理差不多:
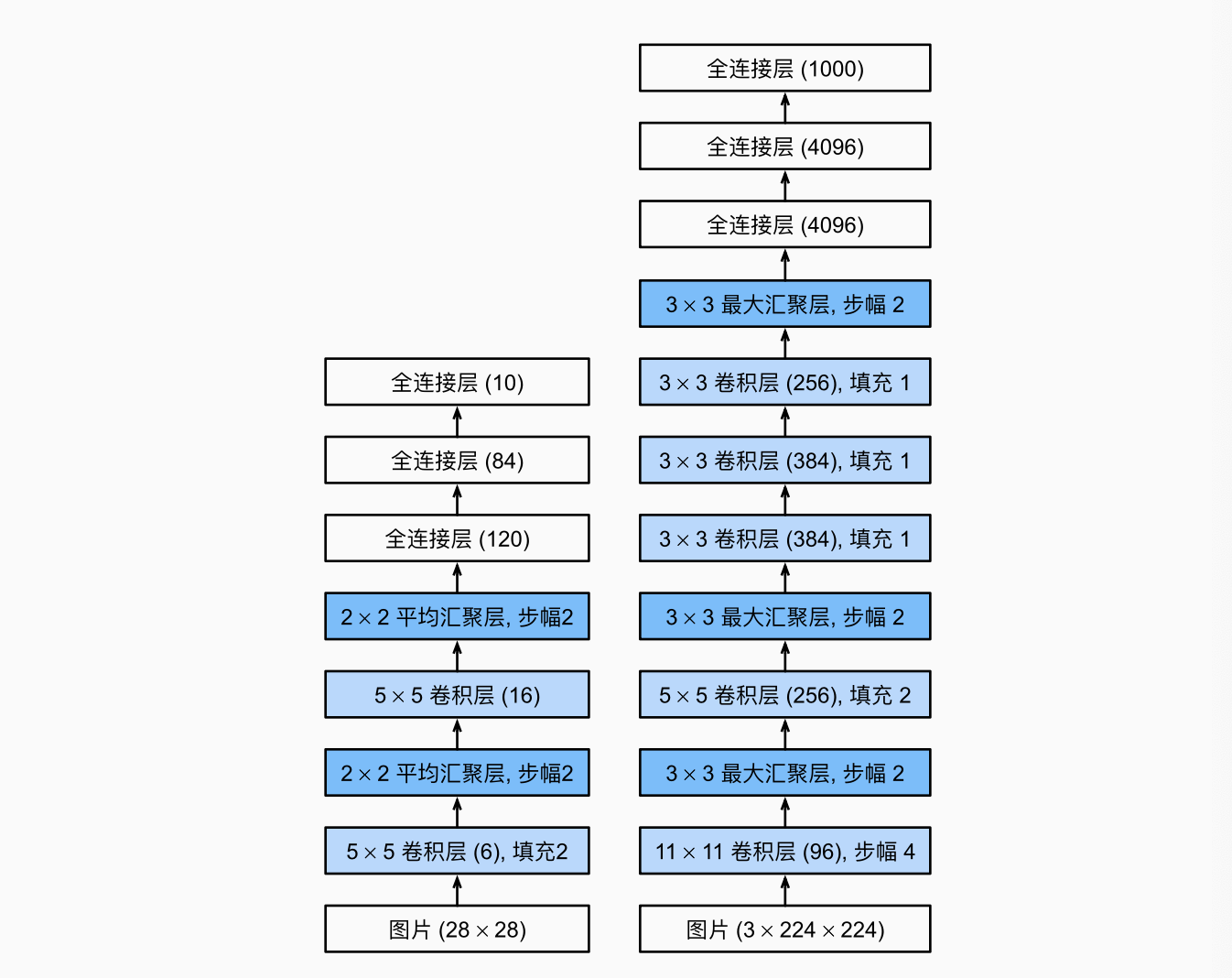
为了应对更复杂的数据集, AlexNet 使用了更多的卷积层和更多的参数
| AlexNet | LeNet | |
|---|---|---|
| 数据集 | ImageNet (1000 class) | Fasion-MNIST (10 class) |
| 激活函数 | ReLU | Sigmoid |
| 容量控制 | Dropout | L2 |
| 图像增强 | 翻转、裁切、变色 | - |
2 使用块的网络 (VGG)
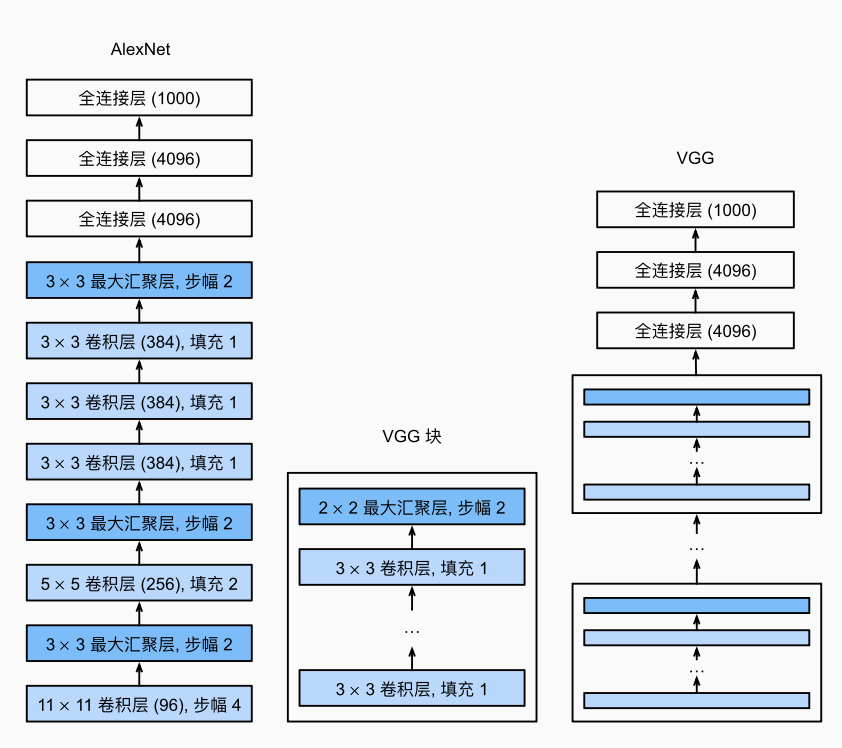
经典 CNN 中, 基本组成部分是由卷积层、激活函数和汇聚层组成的序列. 一个 VGG 块 是由一系列卷积层组成、加上空间下采样的最大汇聚层:
import torch
from torch import nn
def vgg_block(num_convs, in_channels, out_channels):
"""VGG块的实现"""
layers = []
for _ in range(num_convs):
layers.append(nn.Conv2d(in_channels, out_channels,
kernel_size=3, padding=1))
layers.append(nn.ReLU())
in_channels = out_channels #只有第一层in_channel与out不同
layers.append(nn.MaxPool2d(kernel_size=2, stride=2))
return nn.Sequential(*layers)
深层且窄的卷积 (3x3) 比浅层且宽的卷积更有效!
3 网络中的网络 (NiN)
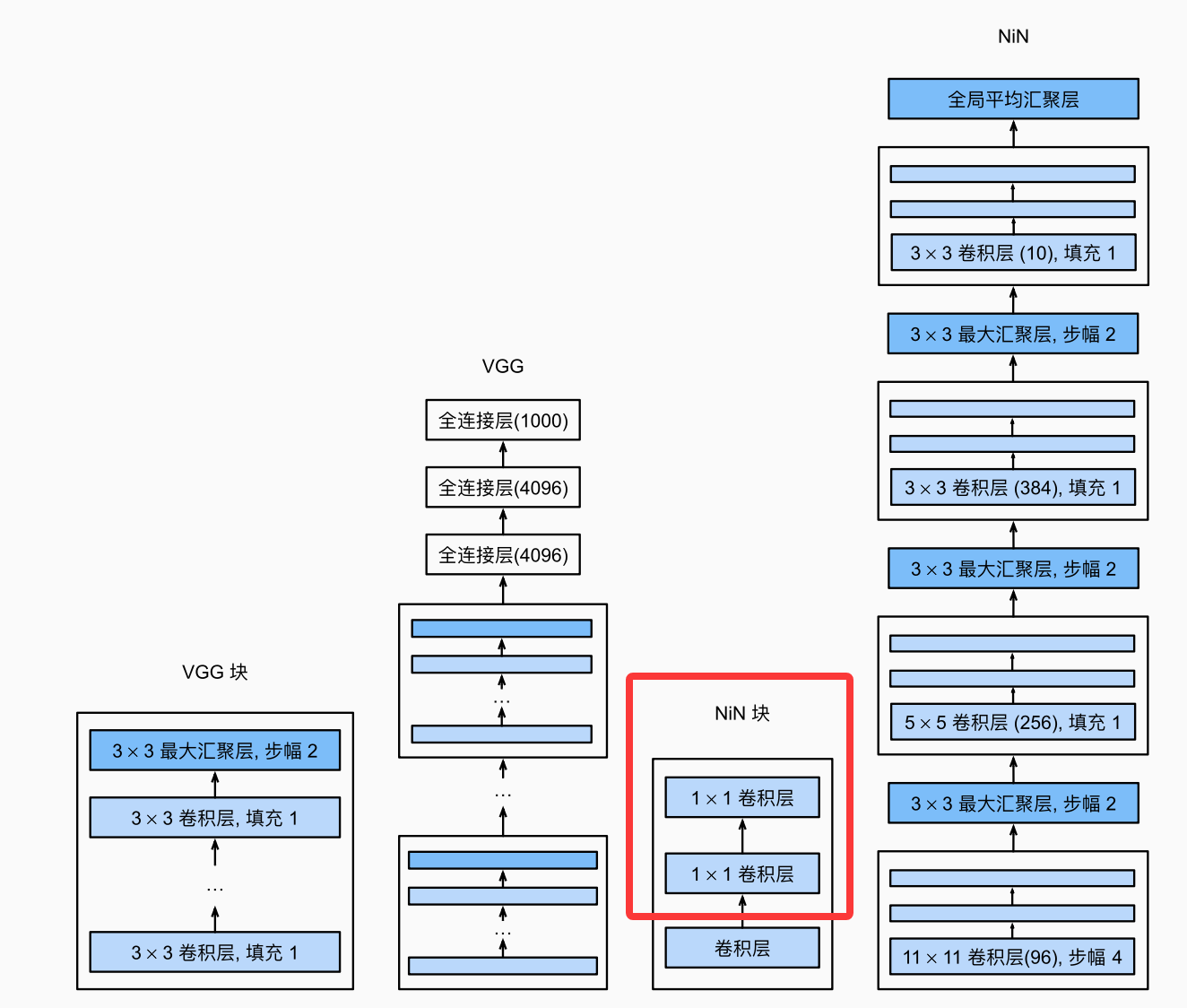
NiN 会在图像的每个像素位置(也即有若干通道) 应用一个全连接层(可以认为是 1x1 的卷积层).
def nin_block(in_channels, out_channels, kernel_size, strides, padding):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU())
NiN 去除了容易过拟合的全连接层, 换成了全局平均汇聚层(在所有位置进行求和)
4 含并行连结的网络 (GoogLeNet)
4.1 Inception 块
GoogLeNet 的基本卷积块.
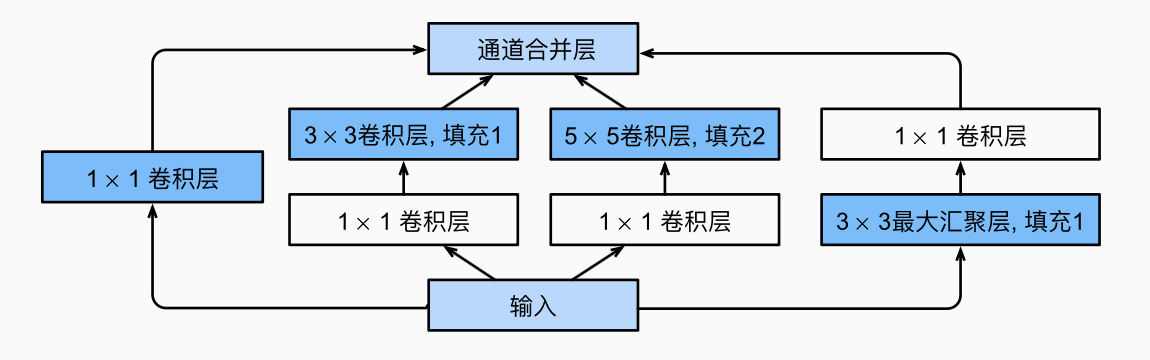
from torch.nn import functional as F
class Inception(nn.Module):
def __init__(self, in_channels, c1, c2, c3, c4, **kwargs):
#c1-c4: 每条线路的输出通道
super(Inception, self).__init__(**kwargs)
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
return torch.cat((p1, p2, p3, p4), dim=1) #在通道维度
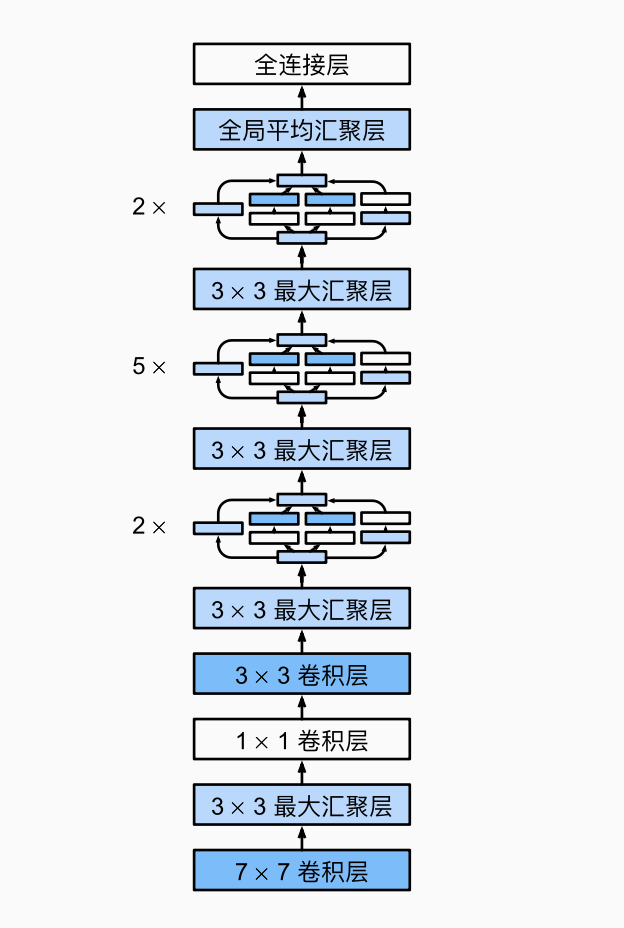
4.2 GoogLeNet 模型
5 批量规范化 (BatchNorm)
如果我们对输入数据单个进行规范化, 那均值都是 0, 学不到任何东西. 因此需要批量规范: 设批量
形式上
5.1 批量规范化层
和传统层相比, BatchNorm 层不能忽略批量大小.
- 对于全连接层, BN 在激活、仿射变换之间.
- 对卷积层, 同样在卷积之后、激活函数之前应用, 对卷积的多个通道分别执行
和 dropout 一样, batchnorm 在训练、测试的表现不一样. 在测试时, 不需要样本均值的噪声和
5.2 从零实现
def batch_norm(X, gamma, beta, moving_mean, moving_var, eps, momentum):
if not torch.is_grad_enabled():#判断训练还是测试模式; 当前是测试模式
X_hat = (X - moving_mean) / torch.sqrt(moving_var + eps)
else:#训练模式
assert len(X.shape) in (2, 4)
if len(X.shape) == 2:#全连接层的情况
mean = X.mean(dim=0)
var = ((X - mean) ** 2).mean(dim=0)
else:#二维卷积层的情况
mean = X.mean(dim=(0,2,3), keepdim=True)
var = ((X - mean) ** 2).mean(dim=(0,2,3), keepdim=True)
X_hat = (X - mean) / torch.sqrt(var + eps)
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta
return Y, moving_mean.data, moving_var.data
net = nn.Sequential(
nn.Conv2d(1,6, kernel_size=5), BatchNorm(6, num_dims=4), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), BatchNorm(16, num_dims=4), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(),
nn.Linear(16*4*4, 120), BatchNorm(120, num_dims=2), nn.Sigmoid(),
nn.Linear(120, 84), BatchNorm(84, num_dims=2), nn.Sigmoid(),
nn.Linear(84, 10))
)
5.3 简明实现
可以直接用 nn.BatchNorm2d:
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5), nn.BatchNorm2d(6), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.BatchNorm2d(16), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(),
nn.Linear(256, 120), nn.BatchNorm1d(120), nn.Sigmoid(),
nn.Linear(120, 84), nn.BatchNorm1d(84), nn.Sigmoid(),
nn.Linear(84, 10))
6 残差网络 (ResNet)
6.1 函数类
假设一类特定的神经网络架构
为了让
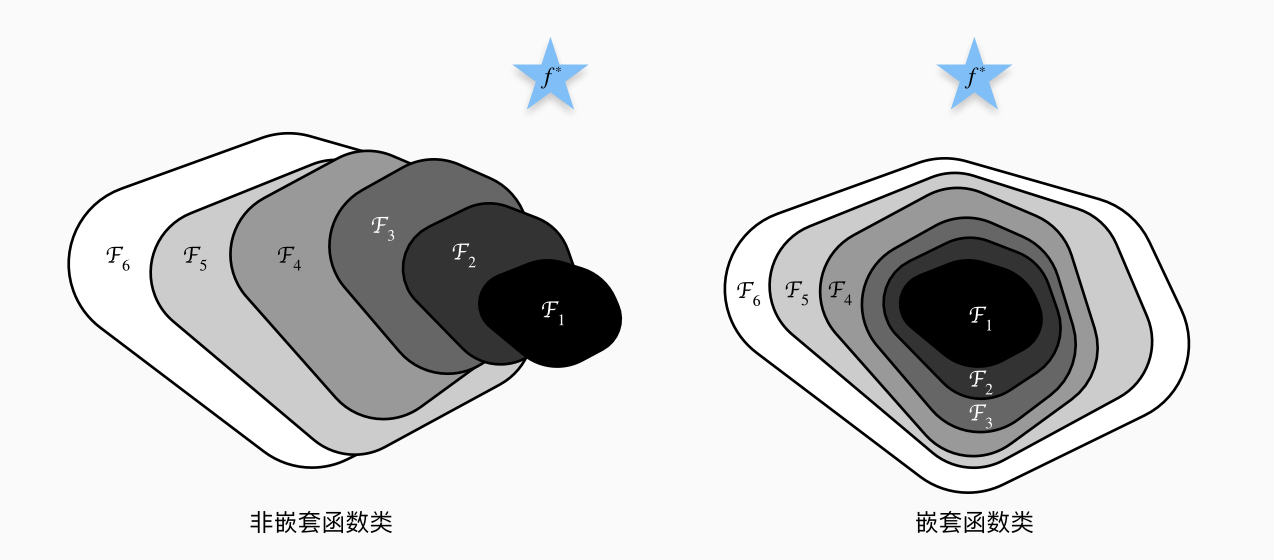
从图中看, 我们需要保证嵌套函数类. 这样, 对于新的架构, 至少我们有恒等映射
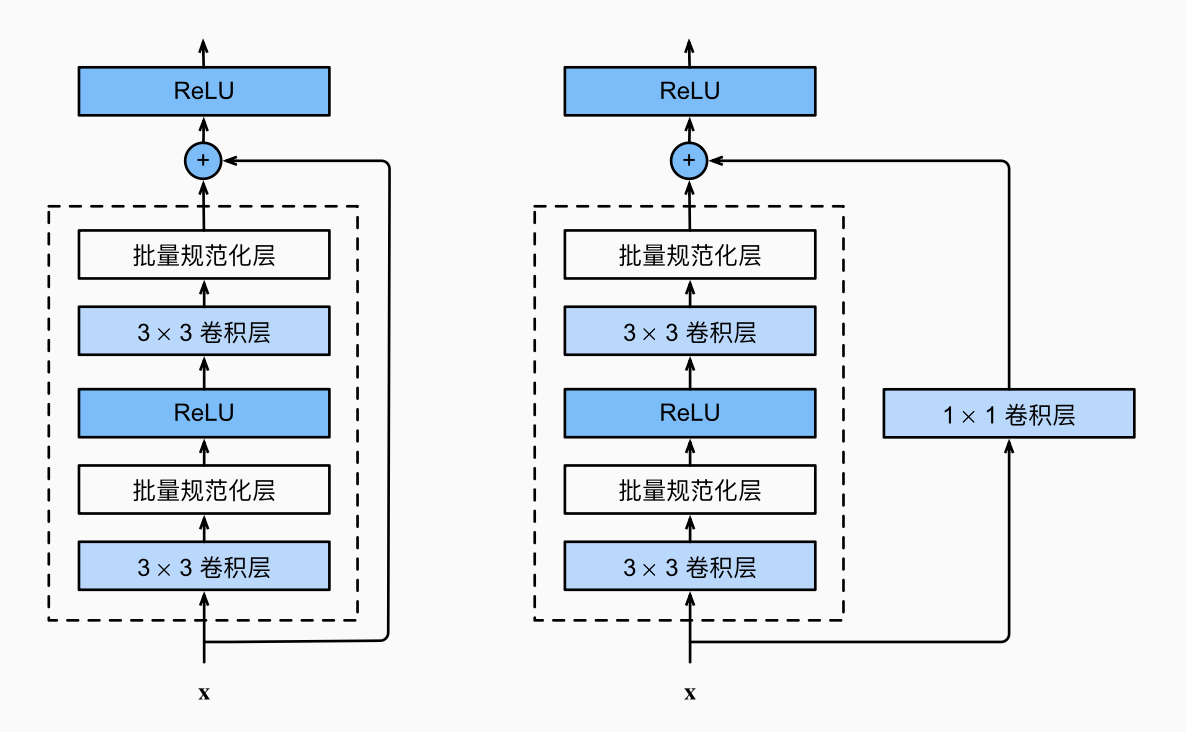
6.2 残差块
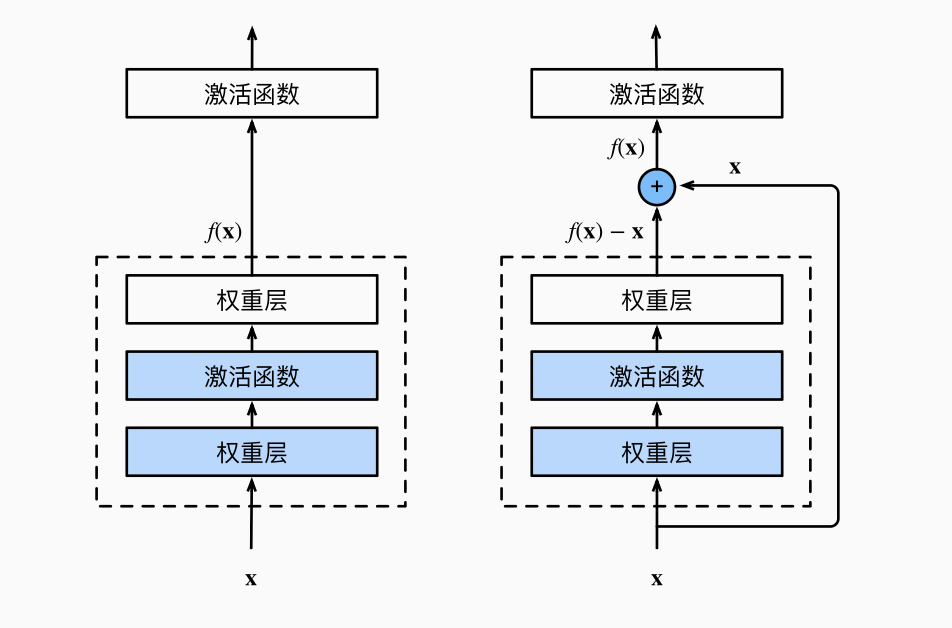
如图, 传统结构中, 我们希望通过这个盒子, 将
ResNet 沿用了 VGG 的 3x3 卷积层设计. 1x1 卷积层用来改变通道数, 将输入变换成需要的形状然后相加.
class Residual(nn.Module):
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
各自的网络结构如图:
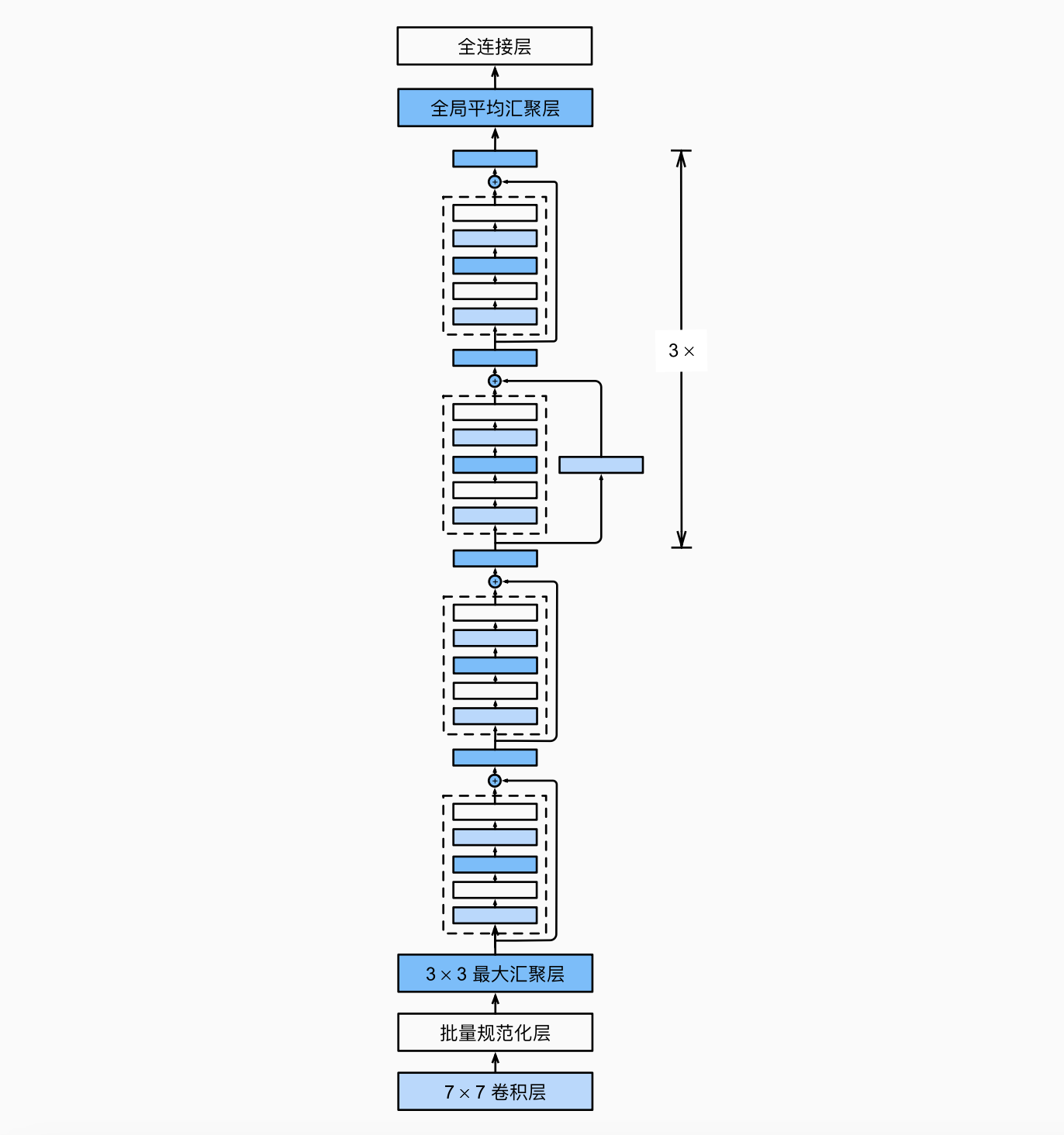
6.3 ResNet 模型
与 GoogLeNet 类似, 将 inception 块变成了残差块.
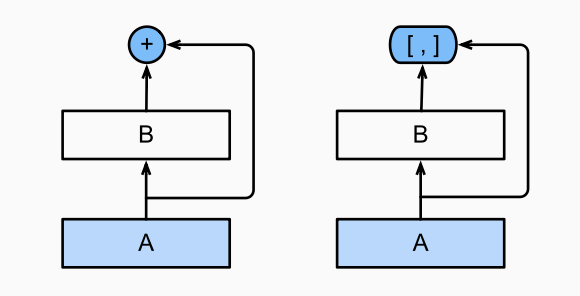
7 稠密连接网络 (DenseNet)
ResNet 将函数进行拆分
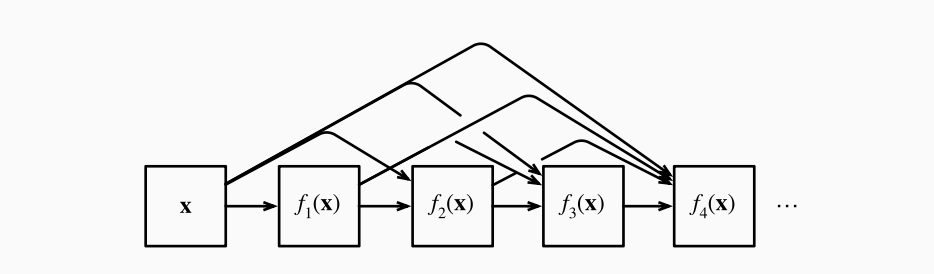
7.1 稠密块
这里用了改良版的"BatchNorm, 激活, 卷积":
def conv_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=3, padding=1))
class DenseBlock(nn.Module):
def __init__(self, num_convs, input_channels, num_channels):
super(DenseBlock, self).__init__()
layer = []
for i in range(num_convs):
layer.append(conv_block(
num_channels * i + input_channels, num_channels))
self.net = nn.Sequential(*layer)
def forward(self, X):
for blk in self.net:
Y = blk(X)
#连接通道维度上每个块的输入和输出
X = torch.cat((X, Y), dim=1)
return X
7.2 过渡层
稠密块会增加通道数, 过渡层则控制模型复杂度(通过 1x1 的卷积层来减小通道数), 再用汇聚层减半宽高.
def transition_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2))
7.3 DenseNet 模型
将 ResNet 的四个残差块替换为四个稠密块
b1 = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
#num_channels为当前的通道数
num_channels, growth_rate = 64, 32
num_convs_in_dense_blocks = [4, 4, 4, 4]
blks = []
for i, num_convs in enumerate(num_convs_in_dense_blocks):
blks.append(DenseBlock(num_convs, num_channels, growth_rate))
#上一个稠密块的输出通道数
num_channels += num_convs * growth_rate
#在稠密块之间添加一个转换层,使通道数量减半
if i != len(num_convs_in_dense_blocks) - 1:
blks.append(transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2